01
Investigación aplicada
Control multiobjetivo del ángulo de paso en turbinas eólicas mediante un modelo híbrido de predicción y optimización
Problema
La velocidad del viento es estocástica, no se puede saber con certeza su disponibilidad. Además, los controladores tradicionales reaccionan al viento observado y suelen asumir comportamientos lineales. Esto limita su capacidad para operar bajo incertidumbre y equilibrar simultáneamente captura energética, estabilidad del rotor y desgaste mecánico.
Modelo
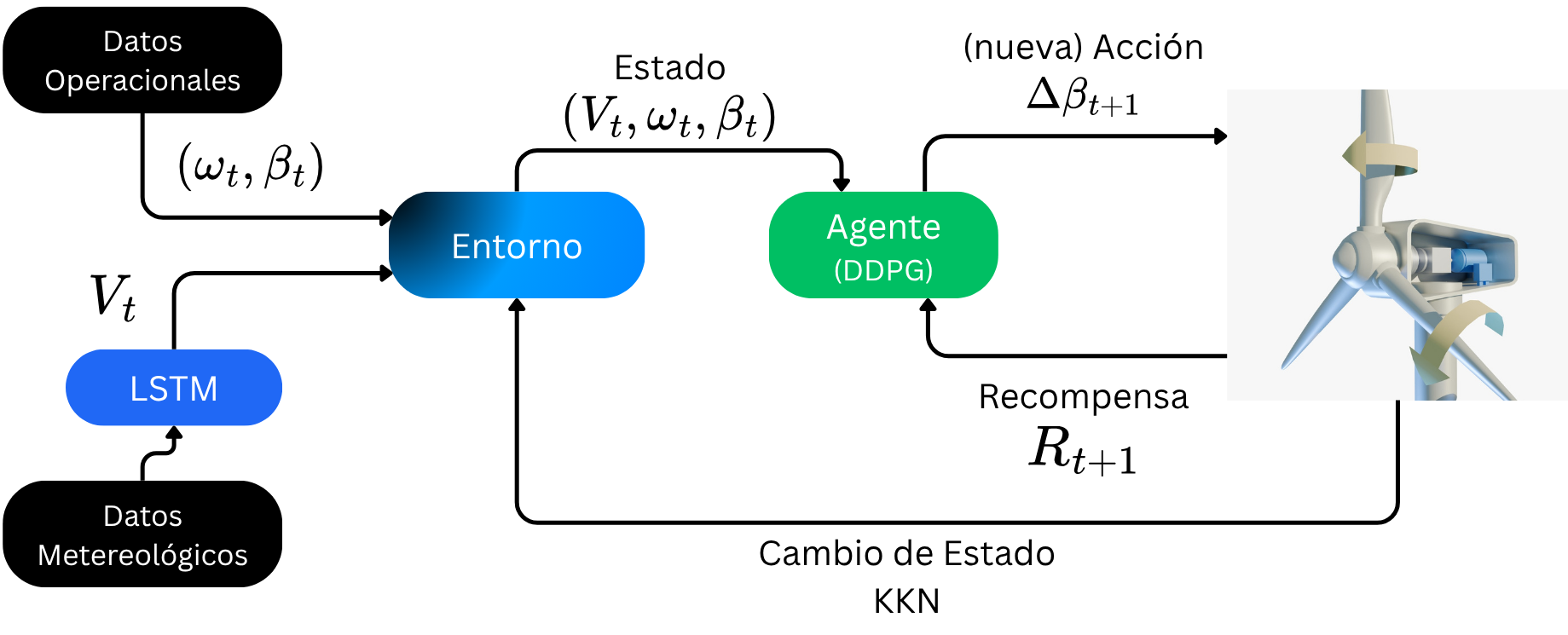
Arquitectura híbrida que combina una red LSTM para anticipar la velocidad del viento y un agente DDPG para ajustar dinámicamente el ángulo de pitch con una función de recompensa multiobjetivo que busca equilibrar la captura energética, la estabilidad operacional y el desgaste mecánico.
Resultados
Caso Chile
- ⚡ Captura un 20% más potencia que la observada en el escenario real.
- 🔄 Reduce un 49% la variabilidad de la velocidad del rotor.
- 🎯 Reduce un 93% el movimiento del controlador de paso (pitch controller).
- 📈 Alcanzó una eficiencia de 806.635, superando tanto los datos reales como el modelo con acceso al viento real.
Caso Suiza
- ⚡ Captura el 97% de la potencia observada en el escenario real.
- 🔄 Reduce un 72% la variabilidad de la velocidad del rotor.
- 🎯 Reduce un 90% el movimiento del controlador de paso (pitch controller).
- 📈 Alcanzó una eficiencia de 0.356, superando los datos reales y el modelo que ve el viento real.